Howdy Howdy Simu Enthousiasts!
We are excited to announced the version 0.15.34 of WYBO Controller ✨
If you have some actuator falling issue, we advise you to migrate to this version.
Download the RPI image here (v0.15.34.1-beta)
Follow the documentation for upgrading here
Bugfixes:
- Fix a minor bug which blocked the "run" if one non-selected odrive had an error
Major improvements:
- Improve the torque_limit calculation
- This prevents actuator "falling" issue
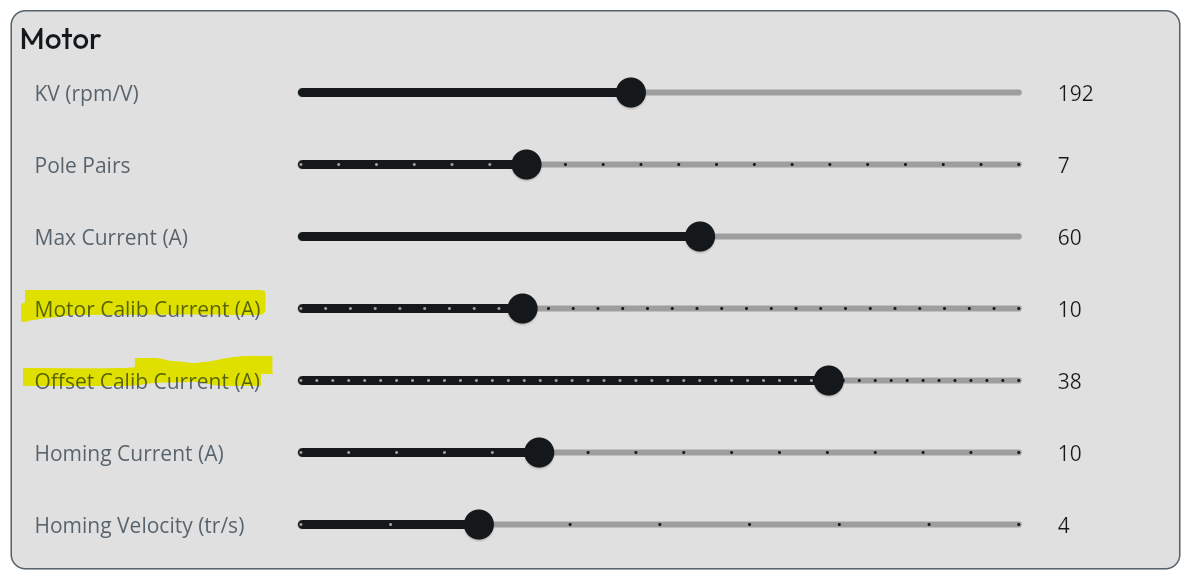
- Split the calibration current in two parameters:
- Motor Calib Current is for motor resistance and impedance measure. the motor does not move: not need for high current
- Offset Calib Current is used for offset calibration and lockin. Current must be enough to move the simu.
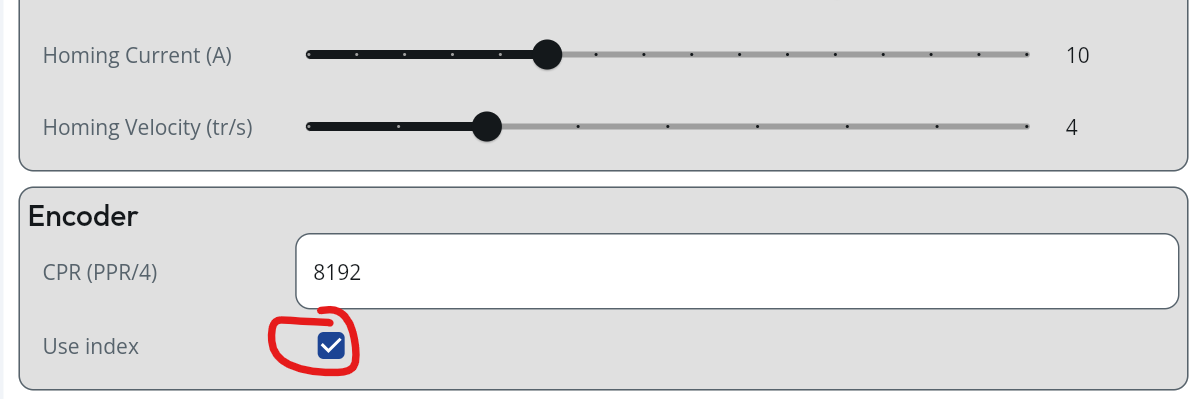
- Add an option to use index
- If you have a stable Z-signal on your encoder, this option will speeds the launching of the system
Minor improvements:
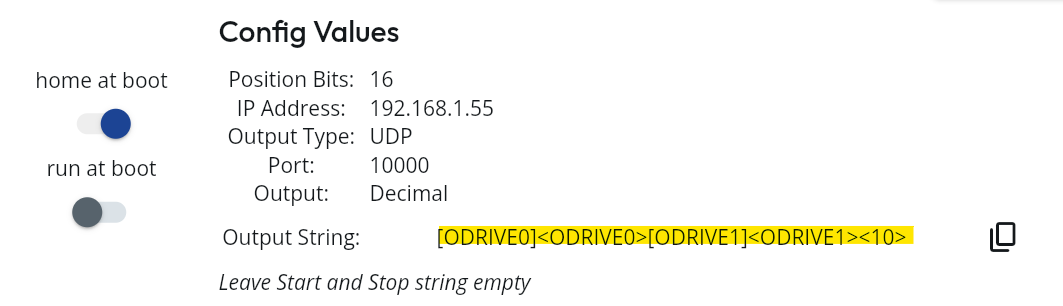
- Output string only display current selected odrives. You have to rename the axis either in Motion software of the controller (axis must have the same name)
- Increase of the resistance_calib_max_voltage to 5V
- This facilitates motor calibration in some cases
- Set the default values for the braking resistance to avoid PSU issue:
- dc_max_positive_current is set to max voltage current
- dc_max_negative_current is set to -2A (peak)
- Set vel_lim to 70% of the motor max specification
- It was set to 100% before
- This is a physical ODrive limit
- Increase default PID at 100% hardness:
- pos_gain = 30
- vel_gain = 0.03
- vel_integrator_gain = 0.1