Howdy Simuers!
Here is the 0.18 version which comes with park position feature.
Download the RPI image for v0.18.37.1-beta here
Follow the documentation for upgrading here
Major improvements:
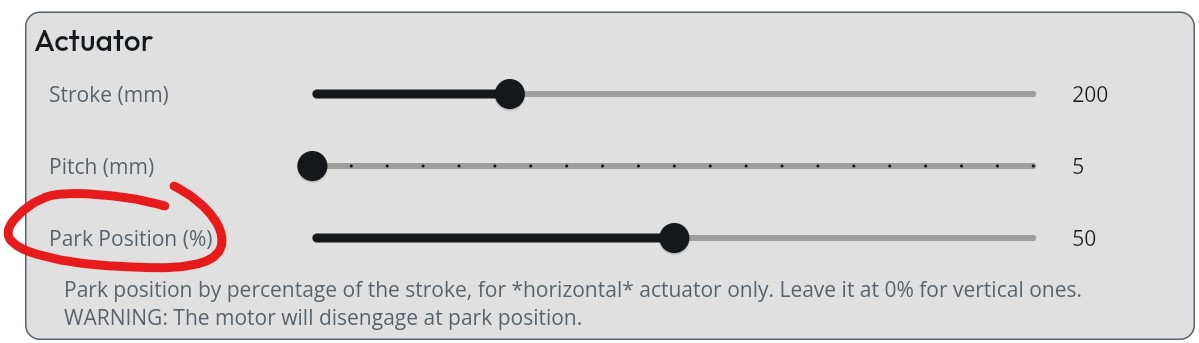
- CUSTOM PARK POSITION
- You can now define a custom parking position for your actuator
- The parameter is available in the axis configuration. So you can apply it to one or multiple axis.
- How does it work ?
- The position is absolute and doesn't depend on travel setting (It will always be at the same point)
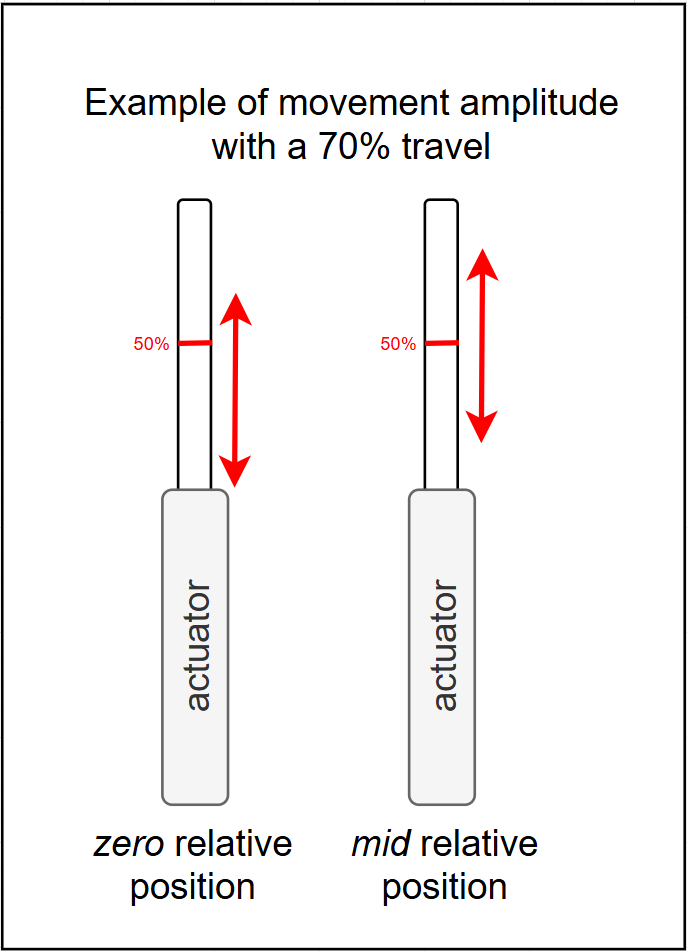
- The axis will automatically work in relative middle position, which mean the movement is centered on the actuator.
- The actuator will go the position right after homing
- WARNING 1: Motor will be released at the parking position, so it is not suitable for vertical actuators.
- WARNING 2: You must configure the same park position on your motion software (FlyPT Mover, SimTools, ...). Otherwise you will face a bump when connecting.

- RELATIVE POSITION SWITCH
- A new switch (again) has appeared in the home screen: Relative Pos
- This switch allow you to choose between:
- zero: The movement will be as close as possible to the homing position, depending on travel settings. This is the default.
- mid: The movement will be centered at the middle of the actuator
- Axis with a custom park position will automatically work in this mode
Minor improvements:
- Use of velocity limit to smoother travel change and first seconds after pushing the Run button.
- We do not use spike filter anymore for that.